دست MOTIF: ابزاری که قابلیتهای فناوری دست رباتیک قبلی را ارتقا میدهد

به گزارش خبرنگار دانش و فناوری گروه دانشگاه خبرگزاری دانشجو، ما در حین بزرگ شدن یاد میگیریم که فقط به اندازهای فشار بیاوریم که یک جعبه را جابجا کنیم و از لمس یک ماهیتابه داغ با دست خالی خودداری کنیم. اکنون، یک دست رباتیک ساخته شده است که این غرایز را نیز دارد.
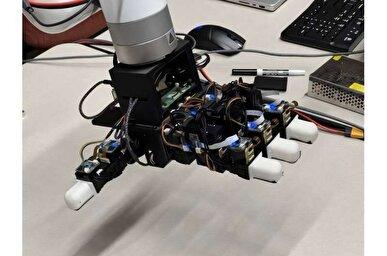
دست MOTIF که توسط یک تیم دانشجویی با همکاری دنیل سیتا، استادیار علوم کامپیوتر USC Viterbi، توسعه داده شده است، بر اساس ایده چندوجهی بودن ساخته شده است - یعنی داشتن چندین توانایی حسی. برجستهترین این تواناییها مربوط به دما و نیرو است، با حسگرهای داخلی برای عمق، نیرو و دما که به دست اجازه میدهد این عوامل را حس کرده و به آنها واکنش نشان دهد.
این قابلیتها نه تنها پتانسیلی برای تحقیقات بهتر با استفاده از دستهای رباتیک ایجاد میکنند، بلکه با جلوگیری از آسیبهای ناشی از دما، به این دستها اجازه میدهند تا عمر طولانیتری داشته باشند. قابلیتهای مرتبط با نیرو همچنین میتوانند کاربرد شگفتانگیزی در دنیای واقعی داشته باشند.
سیتا گفت: در کارخانهها و سایر حوزهها، یک ربات باید برای رساندن اشیا به اهداف خود فشار بیاورد و این امر مستلزم اندازهگیری مقداری نیرو است. این نوع حسگر نیرو میتواند در این موارد کمک کند، فقط برای بررسی اینکه ربات مقدار نیروی مناسبی را اعمال میکند یا خیر.
او افزود: ما قبلاً ندیدهایم که کسی این نوع دست را بسازد.
دست MOTIF بر پایه دست LEAP ساخته شده است که توسط یک تیم تحقیقاتی در دانشگاه کارنگی ملون در سال ۲۰۲۳ ساخته شده بود. پیشرفت کلیدی MOTIF، افزودن قابلیتهای حسی شبیه به انسان است. سیتا گفت، این دست MOTIF که شامل ویژگیها و تواناییهای بسیار دقیقتری شبیه به انسان است، میتواند کاربردهای بیشماری از جمله در کار کارخانه و حتی آشپزی یا جوشکاری داشته باشد.
توانایی این ربات در حس دما از یک دوربین حرارتی که در کف دست تعبیه شده است، ناشی میشود. سیتا و تیمش متشکل از دانشجویان تحصیلات تکمیلی USC Viterbi قصد داشتند دستی بسازند که درک انسان از دما را شبیهسازی کند.
سیتا گفت: اگر در حال آشپزی باشیم، قابلمهای داریم که خیلی داغ است. ممکن است قبل از اینکه واقعاً آن را لمس کنیم، دست خود را نزدیک آن ببریم تا بررسی کنیم که آیا لمس آن بیخطر است یا خیر تا از سوختگی و آسیب جلوگیری شود. ما میخواستیم همین شهود به یک سیستم ربات منتقل شود.
هانیانگ ژو، یکی از نویسندگان مقاله تحقیقاتی «دست MOTIF: یک دست رباتیک برای مشاهدات چندوجهی با حسگرهای حرارتی، اینرسی و نیرو»، که اخیراً از دانشکده ویتربی با مدرک کارشناسی ارشد علوم کامپیوتر فارغالتحصیل شده است، گفت: «این یک سیستم شهودی است که نیاز دارد دست نزدیک به مادهای باشد که دمای آن را تشخیص میدهد.» این مقاله در سرور پیشچاپ arXiv منتشر شده است.
او اضافه کرد: «ما داشتیم فکر میکردیم، آیا به طریقی میتوان سیگنال دریافت کرد، اما چیزی را لمس نکرد؟ بنابراین، یک دوربین مادون قرمز درست در کف دست قرار دادیم.
به عبارت دیگر، دست MOTIF میتواند از طریق این دوربین حرارتی و بدون حتی لمس جسم، دما را تشخیص دهد - فقط کافی است دست را به اندازه کافی نزدیک کنید تا دوربین آن را بررسی کند.
باید حسش کنی
کاری که سیتا، ژو و تیمشان انجام دادند به گونهای طراحی شده بود که فرآیند آزمایش دما و نیرو را طبیعیتر جلوه دهد - به عبارت دیگر، مطابق با تجربیات انسانی با این موارد. به عنوان مثال، نیرو چیزی است که انسانها نمیتوانند ببینند، فقط آن را حس میکنند. دست MOTIF بر اساس همان حسهایی طراحی شده است که ما برای درک ویژگیهای مرتبط با نیرو، مانند وزن یک جسم، از آنها استفاده میکنیم و امکان واکنشهای رباتیک واقعیتر به نیرو را فراهم میکند.
ژو پرسید: «ما به عنوان انسان نمیتوانیم [نیرو]را به عنوان یک حس بینایی تشخیص دهیم، شما باید آن را حس کنید. اما چطور چنین چیزی برای یک دست رباتیک ممکن است؟» «اگر من ندانم که یک بطری آب پر از آب است یا نه، فقط آن را تکان میدهم. من آن را تکان میدهم، درست است؟»
حسگرهای IMU که در دست MOTIF تعبیه شدهاند، این آزمایش ساده را به دنیای رباتیک میآورند. این دست، مانند دست ما، برای تعیین وزن یک جسم، فقط کافی است آن را تکان دهد یا به آن ضربه بزند.
دست MOTIF بر اساس دست LEAP دانشگاه کارنگی ملون ساخته شده بود که متنباز بود. برای پیشرفت بیشتر این فناوری حسی، سیتا و تیمش قول دادهاند که دست MOTIF را نیز متنباز کنند.
سیتا گفت: پیشرفت تحقیقات متنباز برای پیشرفت جامعه واقعاً مهم است. هر چه افراد بیشتری از دست ما استفاده کنند، برای تحقیقات بهتر است.
ژو پیشرفتهای حسی دست MOTIF را به عنوان «پلتفرمی» توصیف کرد که امیدوار است کل جامعه رباتیک برای آینده بر اساس آن بنا شود.
ژو گفت: «ما باید این را برای تیمهای تحقیقاتی بیشتر و بیشتری، تا زمانی که به چنین پلتفرمی علاقهمند باشند، آسان و قابل دسترس کنیم.»